|
1. Принцип подчиненного регулирования и стандартные настройки простейших контуров Системой подчиненного управления (СПУ) называется система автоматического управления, состоящая из нескольких вложенных друг в друга замкнутых контуров, настроенных так. что внутренний контур подчиняется внешнему контуру. который вырабатывает сигнал управления для внутреннего контура и управляет им. Классическая структура СПУ показана на рис. 4.40. Она включает в себя три контура, каждый из которых содержит свой собственный регулятор и датчик регулируемой величины. 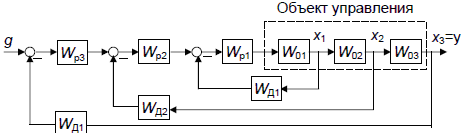 Рис. 4.40 Наибольшее распространение в современном промышленном производстве получили системы подчиненного регулирования. Этот класс промышленных систем характеризуется каскадным включением регуляторов, число которых равно числу регулируемых переменных. Система содержит внутренние контуры, которые образуются за счет местных обратных связей по регулируемым переменным. Структурная схема такой системы представлена на рис. 1. 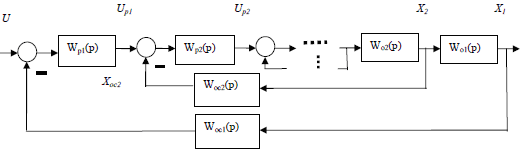 Рис.1. Система подчиненного регулирования Каждый i-й контур системы представляет собой локальную САУ, задающим воздействием для которой является Upi-1 сигнал с выхода регулятора (i-1) контура. Иными словами, i-й (внутренний) контур подчинен (i-l)-мy (внешнему) контуру. При известном коэффициенте передачи i-гo контура установившееся значение переменной на выходе его будет ограничено, если ограничить сигнал на выходе Типовые настройки контуров  Рис. 2. Структурная схема типовой системы  Рис. 3. Структурная схема упрощенной системы В целях исключения статической ошибки в контуре структуру регулятора выбирают такой, чтобы сделать контур астатическим (это приведет к отсутствию статической ошибки), а время переходного процесса было бы минимальным. Этим условиям отвечает применение ПИ-регулятора со следующей настройкой. Известно, что время переходного процесса в контуре будет минимальным, если первая сопрягающая частота (справа от частоты среза) будет в два раза больше, чем частота среза, то есть передаточная функция разомкнутой системы будет иметь вид:  Получили так называемую настройку на оптимум по модулю (ОМ). Другую типовую настройку рассмотрим на примере настройки контура скорости привода постоянного тока. Структурная схема представлена на рис. 4. Известно. что в динамике в подавляющем большинстве случаев реальных приводов влиянием обратной связи по ЭДС можно пренебречь. 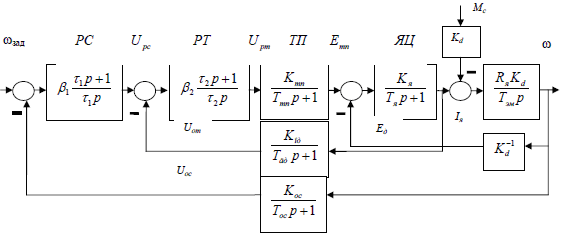 Рис. 4. Структурная схема привода постоянного тока 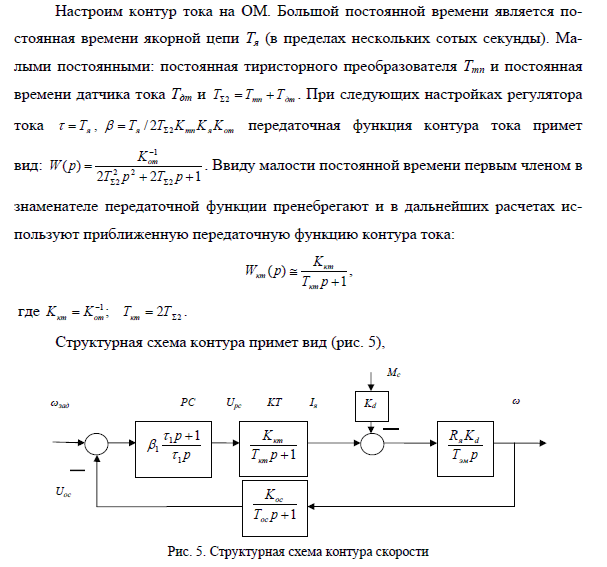 При настройке контура скорости возможны следующие варианты: ПИ-; П-регулятор с настройкой на ОМ: ПИ-регулятор с настройкой на симметричный оптимум (СО).Система с П-регулятором обладает высоким быстродействием, однако изменение момента сопротивления приводит к появлению статической ошибки, что может оказаться недопустимым по условиям заданного течения технологического процесса, обеспечиваемого приводом. |
© cop320 |