|
12) Промышленные роботы. Применение в обрабатывающих и сборочных технологиях. З группы: Основные вспомогательные комбинированные Механообрабатывающие транспортные Измерение манипуляционные системы Сборочные мобильные системы сварочные
здесь нет никаких формул – вопросы на понимание что и почему! 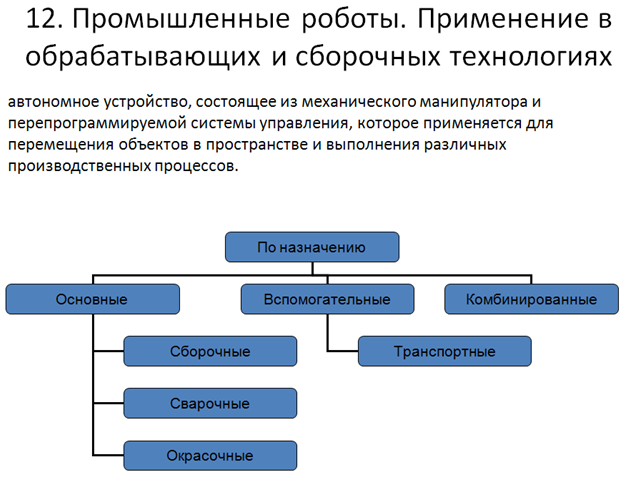 Промышленным роботом (ПР) называют быстро переналаживаемое устройство с собственным программным управлением, позволяющим синхронизировать его действие с другими машинами и механизмами и выполнять с помощью своих механизмов циклически повторяющиеся операции технологического процесса, т. е. это устройство, которое легко вписывается в комплекс технологического оборудования для его обслуживания. Промышленные роботы применяют в металлообработке, штамповке, сборке, литейном производстве. Технический уровень ПР определяют следующие параметры: пределы и степени свободы движения, способность движения в многомерном пространстве, погрешность позиционирования (линейная или угловая погрешность, с которой ПР выполняет свои функции), повторяемость, гибкость системы управления, объем памяти и др. Кроме того, ПР характеризуются своей грузоподъемностью, площадью зоны обслуживания, формами и габаритами захватываемых деталей. По степени участия человека в управлении принято классифицировать роботы на три группы (три поколения).
Системы управления этих роботов снабжены встроенными ЭВМ. В силу своей простоты и надежности наиболее распространены ПР первого поколения, с числом степеней свободы не менее пяти и без обратной связи.
По степени универсальности ПР делят на три группы:
По способу выполнения движения различают ПР с дискретным управлением (последовательное движение по каждой координате) и ПР с траекторным управлением (одновременное движение по нескольким координатам). По методам управления роботы можно классифицировать на два типа: ПР с разомкнутой системой управления (например, с временной зависимостью) и ПР с замкнутой системой управления (скорости определяет сам робот). Системы управления роботами подразделяют на релейные (двухпозиционные), обеспечивающие движение ПР по упорам, и шагового типа, обеспечивающие движение ПР по контрольным точкам, когда величина шага контролируется от позиции к позиции (от одной точки к другой). В отличие от станков роботы программируют, как правило, методом обучения, когда на первом цикле оператор, управляя роботом вручную, имитирует цикл работы. Вся последовательность движений робота, координаты позиций и траектории перемещений запоминаются и воспроизводятся в последующих циклах автоматически. По типу привода различают гидравлические, пневматические, электрические, смешанные ПР. Промышленные роботы бывают неподвижными (стационарными) и подвижными. И те, и другие могут быть как напольными, так и подвесными. К подвижным относятся транспортные ПР, обслуживающие линии, участки, комплексы.
В состав ПР входят: • механизмы захвата и захватные устройства; • механизмы движения рук по цилиндрической поверхности (рука движется по вертикали и поворачивается) и по сферической поверхности; • механизмы перемещения; • датчики. Важной составной частью роботов являются датчики: контактные, сигнализирующие о прикосновении руки робота; локационные, определяющие скорость движения и расстояние до предметов; телевизионные и оптические, образующие искусственное зрение; датчики усилий и моментов на исполнительных руках робота при проведении операции; датчики, различающие цвет, температуру, звучание и другие факторы. Система датчиков служит источником обратных связей для управления роботом. Сигналы датчиков нужным образом преобразуются и обрабатываются на ЭВМ с целью формирования сигналов управления, подаваемых на приводы исполнительных рук. В результате робот начинает действовать с учетом фактической обстановки, т. е. он получает возможность адаптации (приспособления своих действий) к реально складывающейся обстановке. Расчет и конструирование ПР проводят, исходя из комплекса задач по обслуживанию оборудования и выполнению технологических операций, статических и динамических требований при выполнении этих задач (погрешность позиционирования, грузоподъемность, траектории движений, скорости и ускорения подвижных частей). При этом выполняют тщательный анализ существующих технических решений для каждой функциональной части робота (захватов, рук, датчиков, механизмов передвижения, системы управления и пр.) В силу этой специфики при конструировании роботов используют модульный принцип, т.е. составляют ПР из конструктивно законченных отдельных функциональных частей: модулей линейных и угловых перемещений, сменных захватных устройств, комплектов переходных элементов.
Преимуществами ПР являются: • гибкость, возможность обслуживания различного технологического оборудования; • возможность выравнивания работы обслуживаемого оборудования линии, комплекса; • высвобождение обслуживающего персонала, улучшение условий его труда. |
© cop320 |