1) Структура и организация микропроцессора. Принцип работы.
Микропроцессор – программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управление им, построенное на одной или нескольких БИС/СБИС.
Структура любой микропроцессорной системы является магистрально-модульной с микропрограммным управлением. Это означает, что в ней можно выделить набор модулей — устройств, подключенных к общим магистралям, называемых шинами. Принцип магистральности определяет характер связей между функциональными блоками МПС – все блоки соединяются с единой системной шиной.
Шина – это информационный канал, который объединяет все функциональные блоки МПС и обеспечивает обмен данными в виде двоичных чисел. Конструктивно шина представляет собой n проводников-каналов и один общий проводник (земля). Данные по шине передаются в виде слов, которые являются группами бит.
В параллельной шине n бит информации передаются по отдельным линиям одновременно, в последовательной шине – по одной линии последовательно во времени.
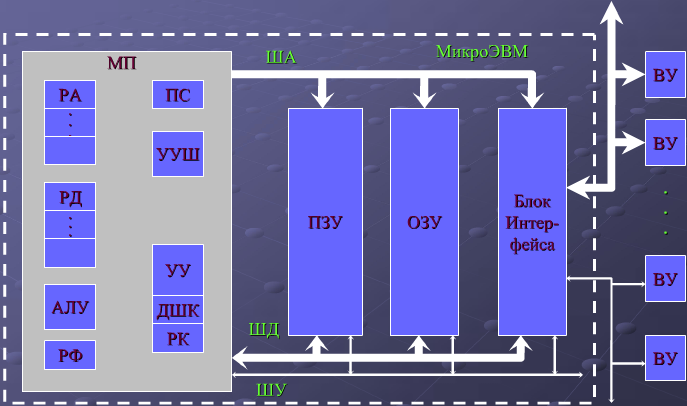
Рис.1.3. Обобщенная структурная схема МПС
Шина адреса AB (Address Bus) является однонаправленной. Она предназначена для передачи адреса ячейки памяти или устройства ввода/вывода (I/O). Направление передачи по шине адреса – от МП к внешним устройствам (ВУ).

Шина данных DB (Data Bas) является двунаправленной. Она предназначена для передачи данных между блоками МПС. Информация по одним и тем же линиям DB может передаваться в двух направлениях – как к МП, так и от него.

Шина управления CB (Control Bus) предназначена для передачи управляющих сигналов. Хотя направление управляющих сигналов может быть разным, однако шина управления не является двунаправленной, поскольку для сигналов разного направления используются отдельные линии. Обозначается эта шина так же, как и однонаправленная.
Принцип модульности МПС состоит в том, что система строится на основе ограниченного количества типов конструктивно и функционально законченных модулей. Каждый модуль МПС имеет вход управления третьим (высокоимпедансным) состоянием. Этот вход называется (Chip Select) – выбор кристалла, или (Output Enable) – разрешение выхода.
Действие сигнала для триггера показано на рисунке 1.4.
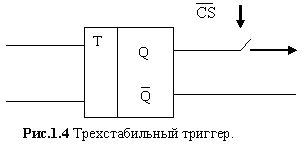
Выходной сигнал триггера Q появится на выходе лишь при активном (в данном случае – нулевом) уровне сигнала . Если = 1, триггер переводится в высокоимпедансное состояние. Выход триггера является трехстабильным, т.е. может находиться в одном из трех состояний: логической единицы, логического нуля или высокоимпедансном. В каждый момент времени к системной шине МПС подсоединено лишь два модуля – передающий и принимающий информацию. Остальные модули находятся в высокоимпедансном состоянии.
Принцип микропрограммного управления состоит в возможности осуществления элементарных операций – микрокоманд (сдвигов, пересылок информации, логических операций). Используя определенные комбинации микрокоманд, можно создать технологический язык, т.е. набор команд, который максимально соответствует назначению системы. В секционных процессорах набор микрокоманд можно изменить, используя другие микросхемы памяти микрокоманд.
Любая МПС может быть представлена как МикроЭВМ и набор внешних устройств (ВУ). Под внешними устройствами понимают устройства двух типов:
- Устройства ввода/вывода информации, обеспечивающие вычислительный процесс и связь с оператором (монитор, клавиатура, внешние запоминающие устройства и т.д.)
- Устройства, обеспечивающие управление техническими средствами технологического оборудования, станками и т.п.
ВУ в зависимости от способа передачи информации разделяют на две большие группы: устройства, обменивающиеся параллельными словами данных, и устройства, обменивающиеся информацией в последовательном коде, т.е. последовательно, бит за битом.
Кроме МП, который также называют центральным процессорным элементом, в состав микроЭВМ входят ПЗУ, ОЗУ и блок интерфейса.
ПЗУ обеспечивает хранение неизменяемых программ работы системы. Если это универсальная система типа персонального компьютера, то в ПЗУ хранится программа базовой системы ввода/вывода (I/O), обеспечивающая функционирование и начальную загрузку системы – инициализацию. Если это специализированная система, типа устройства числового программного управления (ЧПУ), то в ПЗУ заносится все программное обеспечение системы.
ОЗУ предназначено для хранения информации, которая может изменяться в процессе работы системы. Это могут быть данные, промежуточные результаты вычислений и программы, исполняемые в текущий момент времени. В простых системах это только входная информация и промежуточные результаты.
Память организована в виде массива ячеек, каждая из которых описывается своим адресом и содержит байт или слово. Байтом называется последовательность из 8 бит, а слово может иметь любую длину в битах. Наиболее часто под словом понимают двоичное число длиной два байта. Для обращения к ячейке памяти необходимо выдать ее адрес на шину адреса.
Весь обмен информацией МП с ВУ осуществляется через Блок Интерфейса (интерфейсы ввода/вывода). ВУ передают данные из внешней среды в МП или ОЗУ или получают их из микроЭВМ. Для подключения ВУ к микропроцессорной системе его сигналы, скорость передачи информации, формат слов необходимо привести к стандартному виду, с которым работает МП. Все эти преобразования данных выполняются в интерфейсном блоке. Фактически блок интерфейса это набор различных узлов – адаптеров и контроллеров. Сложные ВУ, типа монитора или накопителей на магнитных дисках подключаются через контроллеры ВУ, которые обеспечивают не только преобразование данных, но и управление самими ВУ.