12. Микропроцессорные системы контроля, структура и виды связи с контролируемыми объектами.
- Соединения бывают: 1 объект-1 контроллер, 1 контроллер-несколько объектов.
- Необходимо наличие различных нормирующих модулей (для связи объекта с контроллером)
Цифровая система контроля представляет собой структуру, состоящую из двух частей:
1) аналоговой части, основу которой составляет объект управления (например, двигатель), различного рода усилители и датчики физических величин;
2) цифровую часть, в качестве которой выступают либо технический компьютер, либо промышленный контроллер.
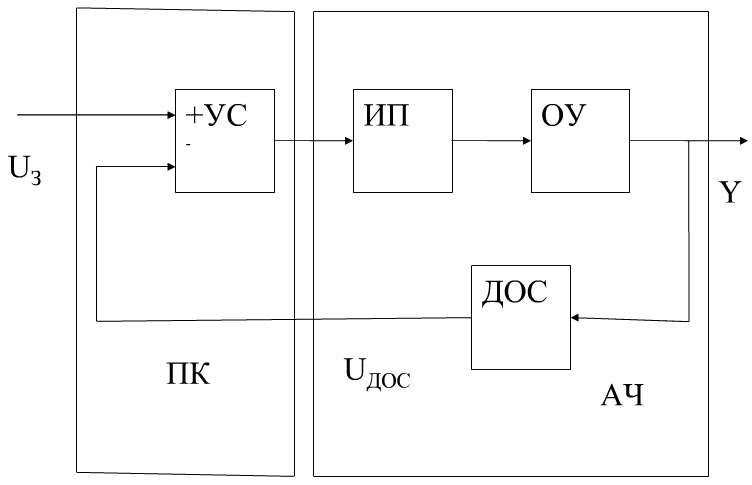
В большинстве случаев аналоговая система управления содержит в общем случае (рис. 1.1) объект управления (ОУ), управляемый источник питания объекта управления (ИП), датчик обратной связи для контроля текущих значений параметров объекта управления (ДОС) и устройство сравнения (УС), которое позволяет определить соответствие между действительным (Y) и заданным (UЗ) значениями параметров объекта управления.
В качестве устройств контроля применяются датчики физических величин, преобразующие различные параметры системы управления в сигналы, выраженные в виде напряжения или тока с различной модуляцией.
В настоящее время все устройства обработки полученной информации строятся на базе цифровой вычислительной техники, основой которых являются персональные компьютеры или микропроцессорные комплексы.
Исполнительными устройствами в большинстве случаев являются электроприводы и гидроприводы.
Общая структурная схема микропроцессорной системы контроля
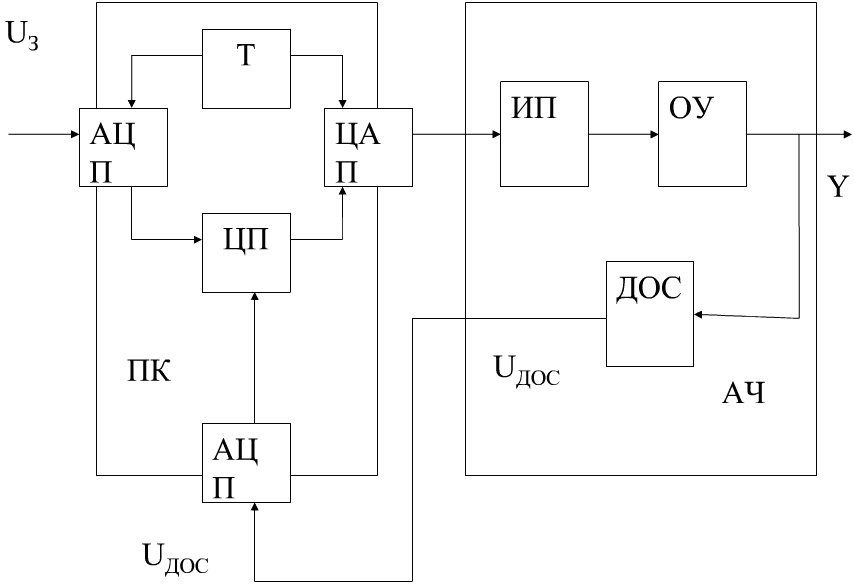
Аналоговые сигналы задающего воздействия (UЗ) и с датчика обратной связи после преобразования в аналого-цифровых преобразователях (АЦП) подаются в центральный процессор (ЦП). В центральном процессоре производится операция вычитания сигнала датчика обратной связи из сигнала задающего воздействия, в результате чего находится сигнал ошибки ε.
На базе сигнала ошибки (разности между UЗ и UДОС) формируется в цифро-аналоговом преобразователе (ЦАП) аналоговый сигнал управления регулируемым источником питания (ИП).
Сигнал задающего воздействия и сигнал с датчика обратной связи подаются в аналого-цифровые преобразователи через определенные промежутки времени, которые называются периодом квантования сигналов по времени. Эти периоды квантования необходимы для предоставления промышленному контроллеру время на обработку информации в центральном процессоре и выводе сигнала управления из цифро-аналогового преобразователя на регулируемый источник питания. Период квантования по времени обеспечивается таймером (Т), который производит временную задержку выполнения программы управления на период квантования по времени.